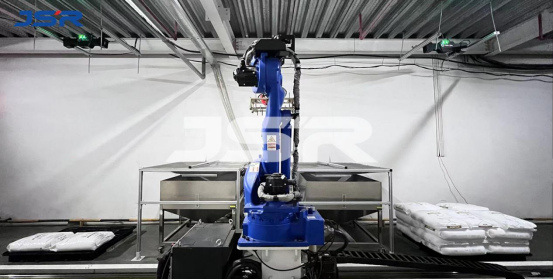
제이에스알'로봇 처리 프로세스 자동화 야스카와 플라스틱 입자백의 취급 및 풀림에 핸들링 로봇이 적용됨 그것은정확하고 안정적이며 지속 가능한 처리 작업으로 생산 자동화 촉진에 가치를 더합니다..
기계, 농업, 의류, 건설, 일상생활 등 어떤 측면에서든 재활용 플라스틱 입자의 양을 확인할 수 있습니다. 포장 후 이러한 입자는 수작업으로 처리해야 하는데, 이는 고비용과 고노동 집약적인 간헐적 작업입니다. 고객의 이전 작업 시간은 8시간이었고, 자재 한 포대의 무게는 25kg이었습니다. 수작업 효율은 분당 2포대이며, 하루에 960포대를 분해할 수 있습니다. 로봇 처리 및 분해 후 작업 시간은 24시간이며, 연속 작동이 가능하고, 효율은 분당 3포대이며, 하루에 4,320포대를 분해할 수 있습니다.
Jiesh가 구현한 솔루션고객용 eng: 야스카와 핸들링 로봇 GP180, 길이 7.5m 접지 레일, 자재함, 자재 랙, GP180 최대 하중 180kg, 최대 암 스팬 2702mm. 7.5m 지구 궤도 유효 이동 거리는 6m, 이동 속도는 0.7m/s입니다. 3D 시각 식별 블랭킹 시스템. 3D 시각 식별 블랭킹 시스템, 학습 기능이 있는 카메라, 초기 자재 데이터 수집 및 이후 자재 모델링을 통해 카메라 인식 성공률은 99.9%입니다.
자동 생산은 작업 효율을 크게 향상시키고, 생산 능력을 안정화시키며, 납품을 정확하게 하고, 안전성을 높이고, 기존 공간을 합리적으로 활용하며, 기업 이미지와 작업장 청결을 개선하고, 무인 생산을 실현합니다.
게시 시간: 2022년 9월 26일
