YRC1000에서 PROFIBUS 보드 AB3601(HMS 제조)을 사용할 때 어떤 설정이 필요합니까?
이 보드를 사용하면 YRC1000 일반 IO 데이터를 다른 PROFIBUS 통신 스테이션과 교환할 수 있습니다.
시스템 구성
AB3601 보드를 사용하는 경우, AB3601 보드는 슬레이브 스테이션으로만 사용할 수 있습니다.
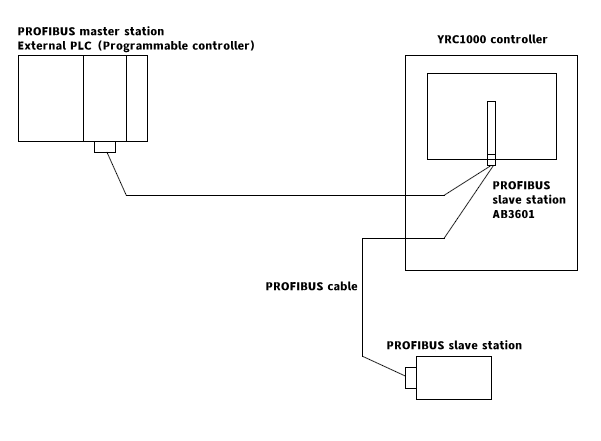
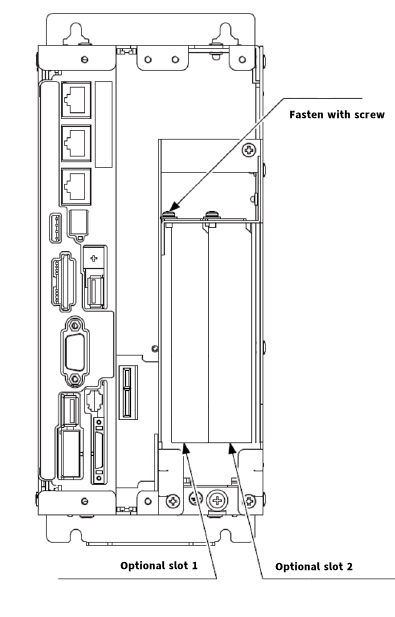
보드 장착 위치: YRC1000 제어 캐비닛 내부의 PCI 슬롯
최대 입출력 포인트 수 : 입력 164Byte, 출력 164Byte
통신 속도 : 9.6Kbps ~ 12Mbps
이사회 배정 방법
YRC1000에서 AB3601을 사용하려면 다음 단계에 따라 옵션 보드와 I/O 모듈을 설정해야 합니다.
1. "메인 메뉴"를 누른 상태에서 전원을 다시 켜세요. – 유지 관리 모드가 시작됩니다.
2. 보안 모드를 관리 모드 또는 보안 모드로 변경하세요.
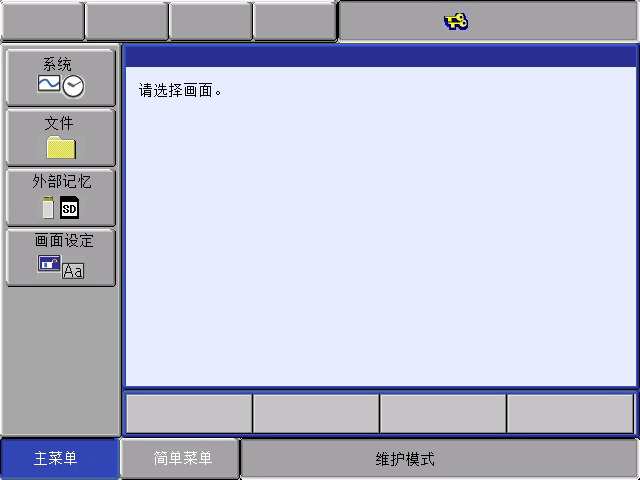
3. 메인 메뉴에서 "시스템"을 선택하세요. - 하위 메뉴가 표시됩니다.

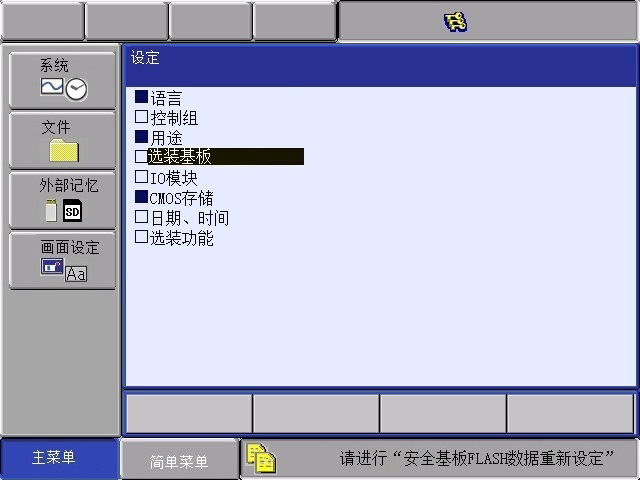
4. "설정"을 선택하세요. - 설정 화면이 표시됩니다.
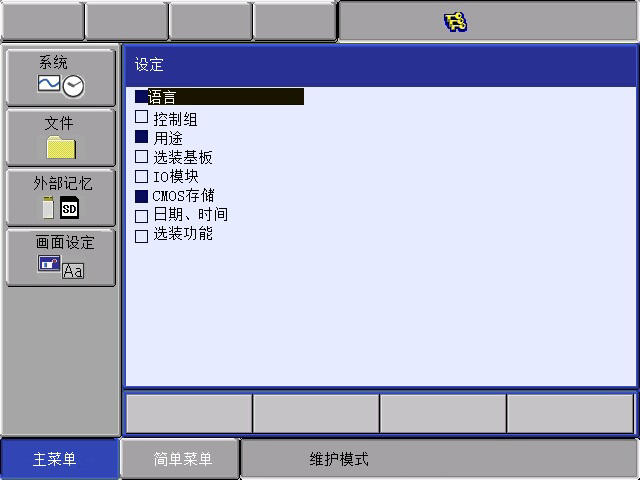
5. “선택 보드”를 선택하세요. – 선택 보드 화면이 표시됩니다.

6. AB3601을 선택합니다. – AB3601 설정 화면이 표시됩니다.

① AB3601 : “사용”으로 설정해주세요.
② IO 용량 : 전송 IO 용량을 1~164까지 설정해 주시고, 본 문서에서는 16으로 설정해 놓았습니다.
③ 노드 주소 : 0~125까지 설정 가능하며, 본 문서에서는 0으로 설정합니다.
④ 통신속도 : 자동으로 판단하므로 별도로 설정할 필요가 없습니다.
7. "Enter" 키를 누릅니다. – 확인 대화 상자가 표시됩니다.

8. “예”를 선택합니다. – I/O 모듈 화면이 표시됩니다.
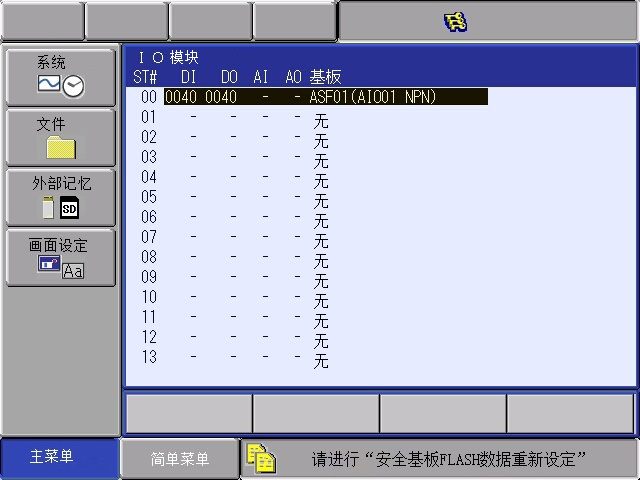
9. "Enter"와 "Yes"를 계속 눌러 I/O 모듈 화면을 계속 표시하고, AB3601의 IO 할당 결과를 표시한 후 외부 입출력 설정 화면으로 넘어갑니다.
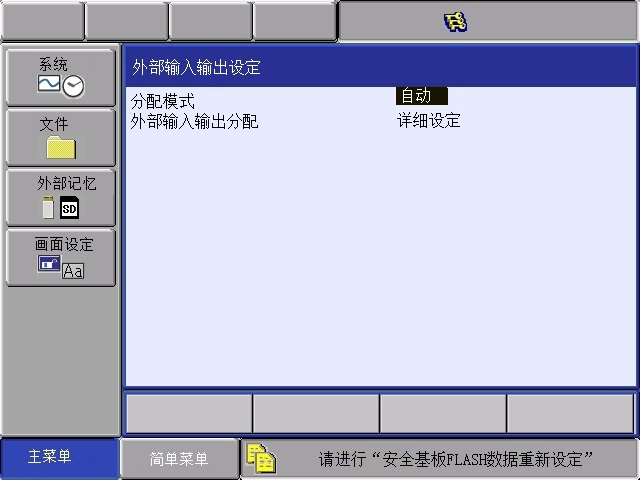
할당 모드는 일반적으로 자동으로 선택됩니다. 특별한 요구 사항이 있는 경우 수동으로 변경하여 해당 IO 시작 위치 지점을 수동으로 할당할 수 있습니다. 이 위치는 반복되지 않습니다.
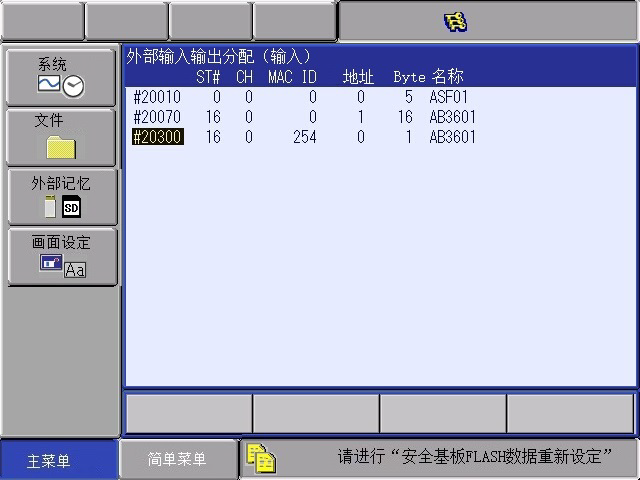
10. 계속해서 “Enter” 키를 누르면 입력과 출력의 자동 할당 관계가 각각 표시됩니다.

11. 그런 다음 "예"를 눌러 확인하고 초기 설정 화면으로 돌아갑니다.
12. 시스템 모드를 안전 모드로 변경하세요. 2단계에서 안전 모드를 변경했다면 바로 사용할 수 있습니다.
13. 메인 메뉴 왼쪽에 있는 "파일" - "초기화"를 선택하면 초기화 화면이 표시됩니다.
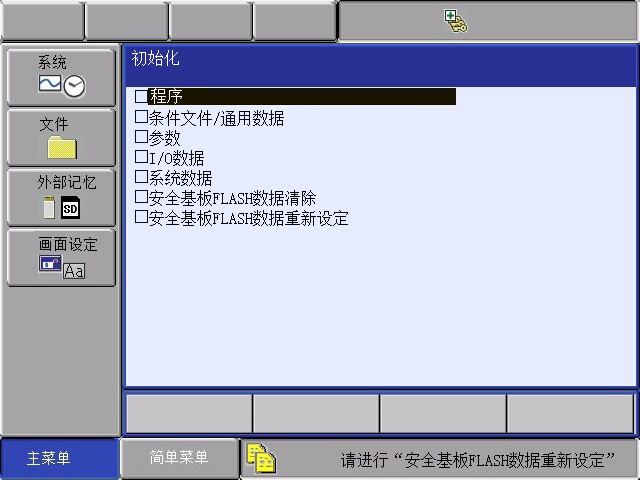
14. 안전 기판 FLASH 데이터 재설정을 선택하면 확인 대화 상자가 표시됩니다.
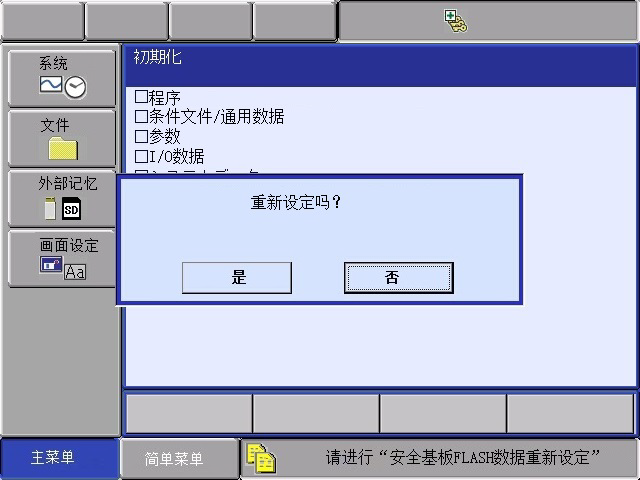
15. "예"를 선택하세요. "삐" 소리가 난 후 로봇 측 설정 작업이 완료됩니다. 종료 후 일반 모드로 다시 시작할 수 있습니다.
게시 시간: 2025년 3월 5일
